 平台热线
平台热线



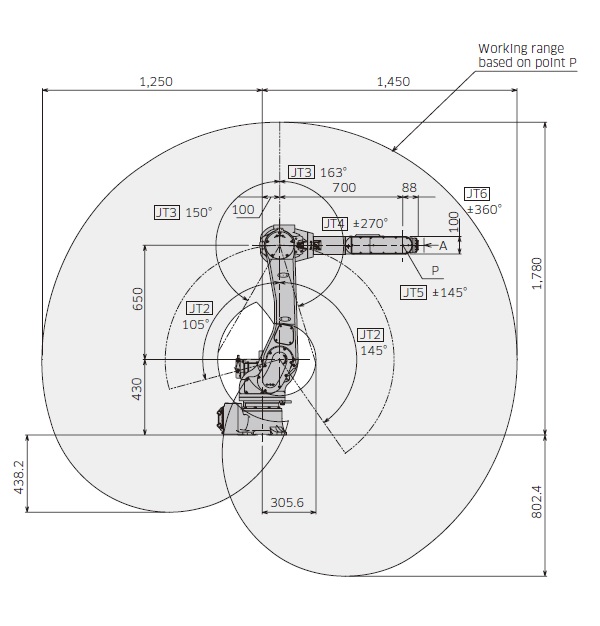
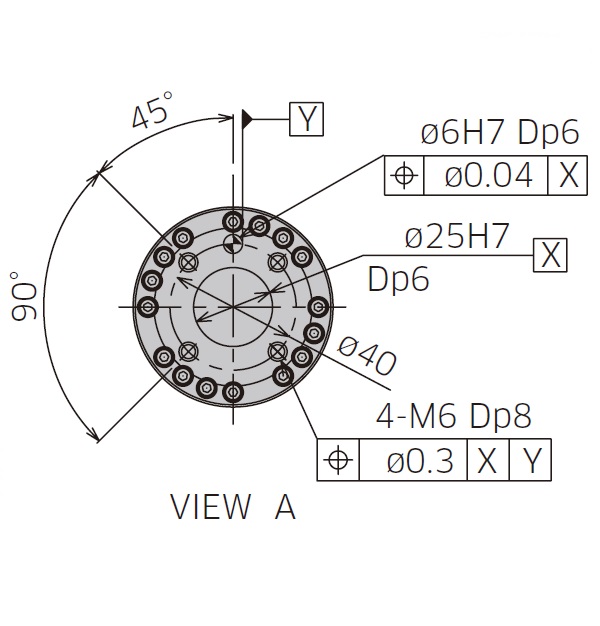
川崎机器人 RA010N
运动范围与尺寸
从导入川崎弧焊机器人之日起,就可以媲美一个熟练焊接工人的焊接品质。
RA010N的规格
| RA010N的规格 | |||
| 类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 | 6 | ||
| *大负载 (kg) | 10 | ||
| *大伸展距离 (mm) | 1,450 | ||
| 位置重复性 (mm) ✽1 | ±0.03 | ||
| 运动范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +145 - −105 | ||
| 手臂上下 (JT3) | +150 - −163 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±145 | ||
| 手腕扭转 (JT6) | ±360 | ||
| *大速度 (°/s) | 手臂旋转 (JT1) | 250 | |
| 手臂前后 (JT2) | 250 | ||
| 手臂上下 (JT3) | 215 | ||
| 手腕旋转 (JT4) | 365 | ||
| 手腕弯曲 (JT5) | 380 | ||
| 手腕扭转 (JT6) | 700 | ||
| 惯量 (N•m) | 手腕旋转 (JT4) | 22 | |
| 手腕弯曲 (JT5) | 22 | ||
| 手腕扭转 (JT6) | 10 | ||
| 惯性力矩 (kg•m2) | 手腕旋转 (JT4) | 0.7 | |
| 手腕弯曲 (JT5) | 0.7 | ||
| 手腕扭转 (JT6) | 0.2 | ||
| 质量 (kg) | 150 | ||
| 机身颜色 | 孟塞尔10GY9/1当量 | ||
| 安装 | 地面, 悬挂 | ||
| 环境条件 | 环境温度(°C) | 0 - 45 | |
| 相对湿度(%) | 35 - 85 (无结露) | ||
| 电源要量 (kVA) ✽2 | 2.0 | ||
| 保护等级 | IP65 | ||
| 控制柜 | 型号 面向北美 | E01 | |
| 型号 面向欧洲 | |||
|
型号 面向日本 & 亚洲
|
|||
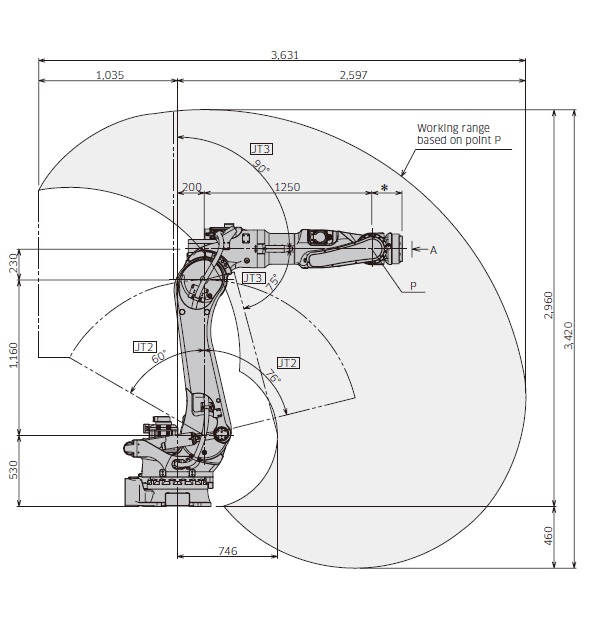
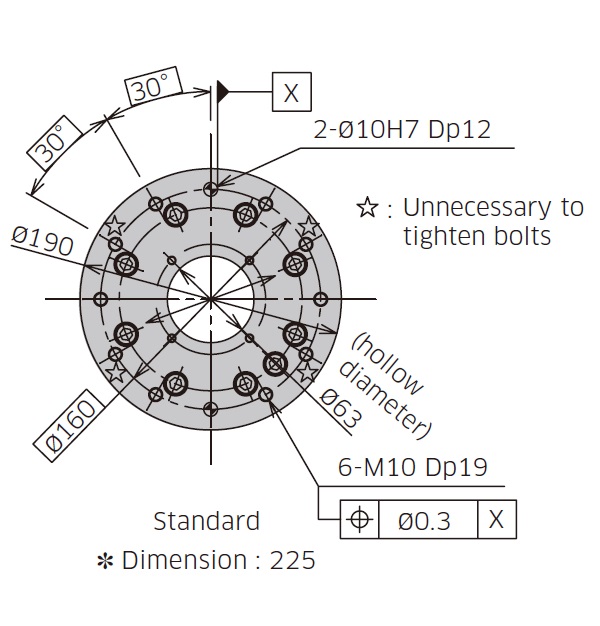
BX100L产品详细说明
运动范围与尺寸
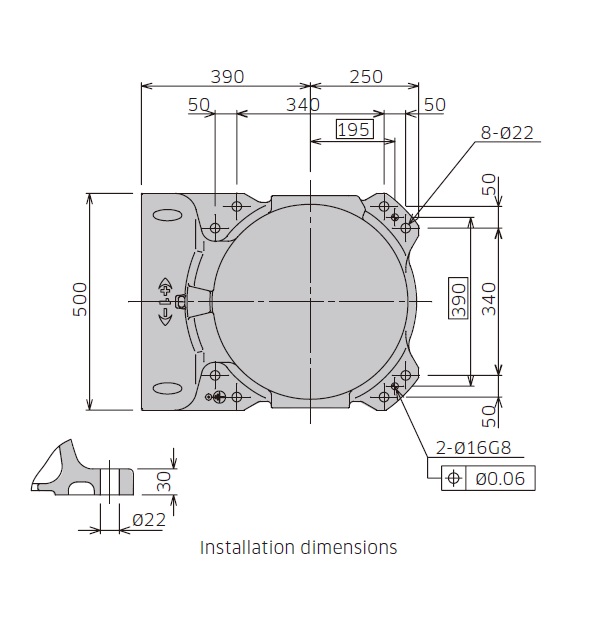
可对应既存机器人的置换,是一款线缆内置、并可对应从小型轻量焊***到中型焊***的高速机器人。
BX100L机器人的规格
| BX100L的规格 | |||
| 自由度 | 6 轴 | ||
|---|---|---|---|
| 负载 | 100 kg | ||
| 水平伸展距离 | 2,597 mm | ||
| 重复性✽1 | ±0.06 mm | ||
|
工作范围 (度) & *大速度 (度/秒) |
轴 | 运动范围 | *大速度 |
| JT1 | ±160° | 105°/s | |
| JT2 | +76° ~ -60° | 130°/s | |
| JT3 | +90° ~ -75° | 130°/s | |
| JT4 | ±210° | 200°/s | |
| JT5 | ±125° | 160°/s | |
| JT6 | ±210° | 300°/s | |
| 手腕承载能力 | 轴 | *大力矩 | 惯性力矩 |
| JT4 | 830 N•m | 85 kg•m2 | |
| JT5 | 830 N•m | 85 kg•m2 | |
| JT6 | 441 N•m | 45 kg•m2 | |
| 质量 | 890 kg (不包括选配设备) | ||
| 机身颜色 | 川崎标准色 | ||
| 安装 | 地面 | ||
| 保护等级 | 手腕: IP67 基座: IP65 *同等 | ||
| 控制柜 | 型号 面向北美 | E02 | |
| 型号 面向欧洲 | |||
| 型号 面向日本 & 亚洲 | |||
